
Computer scientists achieve breakthrough in pheromone-based swarm communications in robots

An innovative, effective and low-cost system which replicates in robots the pheromone-based communication of insect swarms is now being made available to robotics and artificial intelligence researchers after an important breakthrough at the University of Lincoln, UK.
1st block
Swarm robotics is an emerging approach to the coordination of multi-robot systems, which takes inspiration from the natural world to examine the possibilities for improved interaction between robots and their surrounding environment.
In recent years research in this field has been important for advancing the biological study of insects, ants and other species known for their swarm behaviour. It has also contributed to the development of highly accurate vehicle collision sensors, surveillance technology and even aided video game programming.
Until now, researchers specialising in swarm robotic applications have been unable to replicate all the aspects of pheromone communication that occur in the natural world. Scientists have employed both chemical means, using alcohol to simulate pheromones, and physical techniques, using light and sound, to try to accurately replicate pheromone-based communication, but none of these approaches have been completely effective.
Specialists from the University of Lincoln’s School of Computer Science have now produced a novel artificial pheromone system that is reliable, accurate and only uses ‘off-the-shelf’ components.

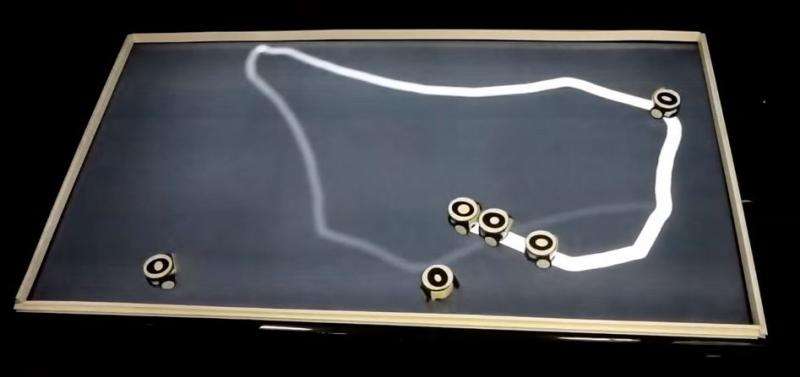
Using an LCD screen and a low-cost USB camera, the system allows users to simulate several pheromones – displayed in the form of visual trails on the screen – and to change their strength to allow for controllable experiments. The visual ‘pheromone’ image on the screen is sensed by two light sensors on the swarm robots, which replicate ants’ antennas.
The new system is called COS-phi (Communication System via Pheromone) and consists of a low-cost open-hardware micro robot and an open-source localisation system, which tracks the robots’ trajectories and releases the artificial pheromone.
Led by Farshad Arvin, PhD researcher in the School of Computer Science, the Lincoln team developed the system using their own Colias platform. They created Colias – an open-platform system that can be used to investigate collective behaviours and be applied to swarm applications – in 2014 in collaboration with experts from Tsinghua University in China.
Farshad said: “Nature is one of the best sources of inspiration for solutions to different problems in different domains, and this is why swarm robotics has developed into such an important area of study. It takes insights from the behaviours and coordination capabilities of social insects, where the success of a group in accomplishing a task relies heavily on the interactions among its members. Among social injects, the use of pheromones is one of the most effective means of communication, but for the swarm robotics community it has also been one of the most difficult to reproduce.
“That is why we are pleased to have devised an effective new system based on fast and precise visual localisation. It allows us to simulate a virtually unlimited number of different pheromones and showcases the results of their interactions as a gray-scale image on a horizontal LCD screen which the robots move on. The system means that we can produce precise and high resolution trails, control the diffusion, evaporation and density of the pheromones, and encode individual pheromones using different colours. COS-phi also simulates the interaction of different pheromones that can amplify or suppress each other, resulting in complex swarm behaviours, just as they do in the natural world.”
Using the COS-phi system, the researchers found that their micro robots were able to follow the leader, or pheromone distributor, without any explicit direction or communication.
The success of the system means that it can now be widely used in bio-inspired swarm robotic research projects, and it paves the way for further studies in this area. The team from Lincoln’s School of Computer Science will now investigate the influence of the rate of pheromone diffusion and evaporation on swarm performance and behaviour in more complex environments with obstacles.
Their original findings, published in the paper COS-phi: A novel artificial pheromone communication system for swarm robotic applications, were presented at the International Conference on Intelligent Robots and Systems (IROS) conference in Hamburg.
Read more at: http://phys.org/news/2015-11-scientists-breakthrough-pheromone-based-swarm-robots.html#jCp
Source
http://phys.org/news/2015-11-scientists-breakthrough-pheromone-based-swarm-robots.html






TRANSHUMANISM…… Gus
TRANSHUMANISM!…… Gus
They want your soul!…. Gus